おもちゃ修理で変速が必要なのは、低回転仕様のモータが壊れた時に、市販モータで代替えしたいときぐらいである。
電圧可変レギュレタによる減速は、電圧降下分が無駄な熱になるので、電池を使うおもちゃでは避けたい。
無駄な熱が出ない PWM でやりたいが、いくつか疑問点があるので調べておく。
モータはマブチ FA-130RA-2270 とする。
ところで変速が必要なおもちゃってあるかな?
あればいいと思うのは、鉄道模型、UFOキャッチャー、赤ちゃん用回転メリー、道路が循環するドライブゲーム、回転クリスマスツリー、電動乗用車、メリーゴーラウンド、扇風機ぐらいであまり出番がないかも知れない。
(2)PWM 基本事項
①PWM とは Pulse Width Moduration の略で、定電圧矩形波のパルス幅を変化させ、出力電圧(変換値)を変える方法
変換値とは変な言葉だが、これについては後述する。
電圧 1 と 0 の時間を変化してるだけだから 勝手に 0.5 などになるわけがない、なにがどうやってならしてくれてるんだろう?
ならすといえば、コンデンサが頭に浮かぶが、PWM 出力にコンデンサをつけるなんて聞いたことがないのはなぜ?
②波形
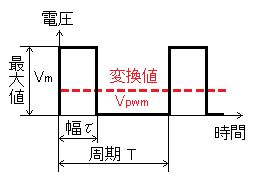
パラメータは、入力電圧値 Vm、周期 T、パルス幅 τ、出力変換値 Vpwm の 4 つである。
普通は周期の 1/100 を 1 パルス幅とし、幅と周期との比を DUTY という。
D = τ/ T で 0.25 と言ったり 25 % と言ったりする。
DUTY が 0 % とは出力が 0 V 連続、DUTY が 100 % とは Vm 値連続となる。
DUTY は 1 周期中では変えない。
周期が 1 秒だと 1 秒毎しか DUTY が変えられないので変化が遅いが、周期を短くすれば変化が早くなる。
モータなどは出力変化が速すぎると応答できないので、負荷に応じた周期にするのがよい。
(3)疑問点
DC モータ を PWM で駆動する WEB 記事はたくさんあるが、パラメータをどのように決めるか?について明確なのはほとんどない。
①入力電圧
① - 1 入力電圧は高いほど良い?
ON 時はいつも最大電圧 Vm がかかるので高トルクが得られて良いというが本当か?
FA-130RA は定格電圧と言わず適正電圧 1.5 V、 適用範囲を 3 V と言っている。
おもちゃでは電池 1.5 V の倍数になるから、DUTY を 100 % にした時 1.5 V とするのが普通である。
入力を 3 V にし、DUTY を 50 % 程度にして 1.5 V にすると何が得なのか?
②周期
② - 1 周期の決め方が明示されていない。
電気的時定数の数倍とかあるが 5 倍 ~ 100 倍と幅が大きい。第一、電気的時定数なんてわからないことが多い。
市販 PWM キットの周期も 45 Hz、140 Hz、490 Hz、1 KHz、10 KHz、25 KHz、100 KHz などマチマチである。
② - 2 最適な周期の判断方法は?
② - 3 周期を変えても DUTY が同じなら変換値は変わらないのか?
③出力電圧
③ - 1 なぜコンデンサで平滑しないのか?
定電圧源でなく、電圧を急激に変化させるのが目的だから、動きの遅くなるコンデンサは意味がない?
いびつな出力がより平均化されるのだからモータにとっていいはず。
つけたらどうなるか?
③ - 2 計算法は?
WEB で実効値 = Vm×√DUTY、平均値 = Vm×DUTY と詳しく理論的に説明されているが実測と合うか?
③ - 3 電圧の測り方
どんな計器で測定できるのか?
③ - 4 電圧はどうして変わるのか?
(4)TEST機の構成
① DC モータはマブチ FA-130RA-2270 とし、以前製作した適正負荷をまわす。
1.5 V で 0.64 A、6623 rpm となる負荷である。( 修理方法 006 モータ )参照
正逆はせず正方向運転のみとした。
フライホイルダイオードとして、1000 V 1 A の 1N - 4007、ノイズ除去用コンデンサとして 50 V 積層セラミック 0.1μF をつけた。
② モータドライバは、手持ちの Nch MOSFET の 2SK 4033 を使用した。
60 V、5 A、ON 抵抗 0.07 Ω、Turn-off 35 ns、4 V 駆動
ゲート入力は PWM or 連続 5 V が切替えられるように SW をつけた。
③ PWM 信号は GAOHOW モジュールを使用した。
Amazon で ¥798
モジュール電源は、3.3 ~ 30 V、FET が 4 V 駆動 なので 5 V とした。
周期 0 ~ 150 KHz 可変で精度は各レンジで約 2 %
DUTY 0 ~100 % 可変
出力電流は約 5 ~ 30 mA
PWM 振幅は電源電圧と同じ。
周囲温度は - 20 ~ + 70 ℃
シリアル通信内臓 (今回不使用)
周期と DUTY の設定は、4 個のタクト SW で増減、長押しで早送り
設定変更中も直前の設定値で出力されており、変更後 SET 表示が OUT 表示に変わり、出力が変わる。
設定早送り時は、0.5 秒くらいの後追いで出力が変化する。
電源 OFF で直前の設定値が記憶される。
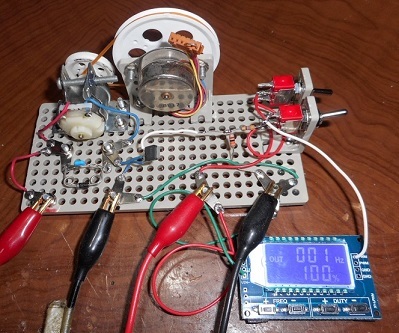
④ 配線は 穴あき板に 3 ㎜ ビスとナットでスタッドを立て、卵ラグ配線をナット締め
穴あき板とモジュールは 4.5 mm 厚ハードスキマテープの 4 つ足をつけた。
⑤ モータ音は紙コップをモータブラケットに押し当てて聞いた。
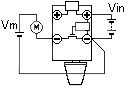
(5)回路図
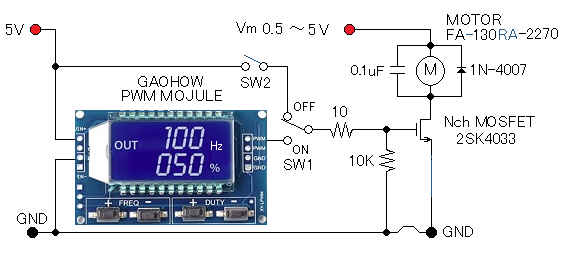 PWM モジュール とモータは別電源、GND は共通
PWM モジュール とモータは別電源、GND は共通FET は SW 1 を ON で PWM 駆動、SW 1 を OFF、SW 2 ON で 5 V 駆動
10 Ω は ゲート突入電流制限抵抗、10 KΩ はプルダウン抵抗
MOSFET の記号は自己流
制限抵抗は、ゲート電流 = 入力電荷量 / 立上り時間 = 15 nc / 30 ns = 0.5 A
ゲート抵抗 = ゲート電圧 / ゲート電流 = 5 V / 0.5 A = 10 Ω
1.5 V、10 Ω 抵抗負荷時の実測立上り時間 10-90 は周期に関係なく 560 ns ぐらい。
(6)試運転
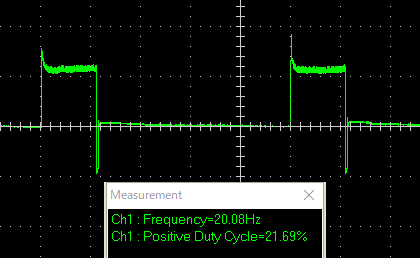
回路とモジュールの動作確認のため、とりあえず Vm = 1.5 V、DUTY 50 %、周期 100 Hz、負荷有りで運転してみた。
電圧は、Sanwa PM 3 デジタルテスターの DCV レンジで、電流は、定電圧電源付属の 3 桁デジタル電流計で、回転数は、デジタルタコメータ DT-2234C で測定
SW 1 ON で、モータ両端電圧 0.91 V、電流 0.42 A、4260 rpm で回転、特に異常音なし。
FET DS 間電圧 0.51 V
エーッ? FET で 0.51 V も消費している?!・・・ 疑問点が増えた。
MOSFET 2SK 4033 の動作確認のため、ゲートに 5 V 連続でモータを回してみた。
SW 1 OFF、SW 2 ON で Vm 1.51 V、モータ両端電圧 1.38 V FET DS 間電圧 0.04 V、電流 0.51 A、6726 rpm となる。
FET で 0.04 V の消費、ON 抵抗は、0.04 V / 0.51 A = 0.078 Ω でまずまず思惑通り。
PWM にするとなぜこうなるのか?
パルス波の 0 区間は、ゲート電圧 0 V で電流が流れていないのに流れていると勘違いしていた。
FET が OFF になったとき、DS 間にモータのフライバック電圧等がかかり、これを測定していたということのよう。
流れていないので、FET で消費してない。
ゲート 0 V、モータが完全停止状態では、FET の DS 間は 1.5 V ある。
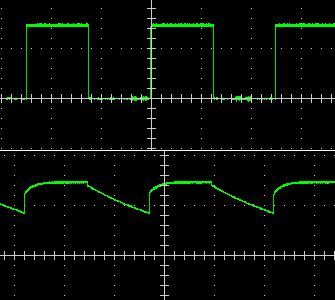
オシロ波形は
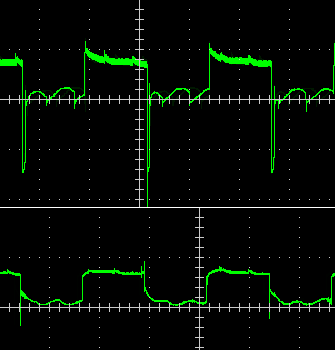
DIV は 1 V、4 ms
波形がきたないので Hz、DUTY の自動計測ができなかった。
目測で、周期 100 Hz (10 ms)、DUTY 50 % あたりとは確認できた。
SDS-200A オシロは、 Win 7 → Win 10 UP 時に動作しなくなったが、動作可能にできる!という WEB 記事のおかげで再インストールできた。
出力電圧は、乱れてはいるがもとのパルス形のままで平均化などされていない!
これは、モータが 0.91 V を連続してかけた時と同じ挙動をしているようだということで、1.5 V が 0.91 V になったということではない。
出力電圧が自由に変えられるという表現は誤解を招く。
下図はモータ端子に 35 V 1000 μF のコンデンサをつないだもので
モータ両端電圧 0.99 V、電流 0.42 A、4700 rpm となる。
FET DS 間電圧 0.44 V
モータ両端電圧が上昇、回転数が増加した。
きれいな波形を見るため、モータの代わりに 10 Ω 2 W の抵抗をつけて計測した。ダイオードと 0.1μF はなし。
Vm 1.50 V、抵抗両端電圧 0.73 V、電流 0.07 A
FET DS 間電圧 0.76 V ・・・ Vm の 50 % ぐらい?
自動計測で 100 Hz、DUTY 50 % を示したのでモジュールは正常に出力している。
抵抗では挙動の状態はわからない。
下図は抵抗端子に 1000 μF のコンデンサをつないだもので
抵抗両端電圧 1.26 V
FET DS 間電圧 0.21 V となる。
DUTY は 69 % を示した。
電圧はかなり平均化されている。
PWM 変換値について
DUTY 50 % の理論上の実効値は Vrms = 1.5 √0.5 = 1.06 V、平均値は Vave = 1.5 × 0.5 = 0.75 V である。
試運転時のテスター表示値は 0.91 V なので実効値と平均値の中間あたりを示した。
そもそも乱れたパルス波を普通のデジタルテスターで見て何が測れるのかよくわからない。
計算と実測が合わないのと 特に PWM の実験では、不用意に実効値とか平均値とか言いたくない。
なので、PM 3 デジタルテスターの DCV レンジの表示値を 変換値 Vpwm と言うことにした。
なにかわからないが、電圧計が値を表示しているので、判断の目安にはなる。
疑問点 ③ - 2、③ - 3 の答えになる。
(7)疑問点の確認運転
① DUTY 0 %、100%、周期 0 Hz の確認
モータ Vm を 1.5 V、
DUTY を 0 % にして 0 Hz ・・・ 回転せず。
DUTY を 0 % にして 1 Hz → 100 Hz ・・・ 回転せず。
DUTY を 100 % にして 0 Hz ・・・ 最高回転した。
DUTY を 100 % にして 1 Hz → 100 Hz ・・・ 最高回転のまま連続
デジタル設定なので 当然かな。
② 疑問点 ② - 3 周期を変えても DUTY が同じなら変換値は変わらないの確認
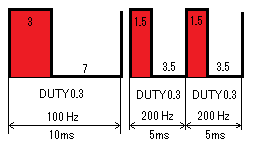 理屈は、周期を変えても DUTY が同じなので、同一時間での仕事は同じ。
理屈は、周期を変えても DUTY が同じなので、同一時間での仕事は同じ。電圧がかかれば電流が流れて仕事をする。
赤の面積を仕事 ( W = V × I ) とすれば左右のトータル面積は同じ。
周期を早くすると仕事が小分けされるので、脈動が連続に近くなる。
Vm = 1.5 V、DUTY 50 % で 10 Hz → 150 KHz とし、モータ両端電圧を測定
| 周波数(Hz) | モータ電圧(V) | 挙動 |
| 10 | 0.965 | 異常なし |
| 50 | 0.951 | 異常なし |
| 250 | 0.849 | 異常なし |
| 1.25 K | 0.547 | 少し遅くなる |
| 6.25 K | 0.289 | ゆっくり回転 |
| 31.3 K | 0.196 | 起動できず |
| 150 K | 0.065 | 起動できず |
周期を変えると変換値が変った。
負荷が抵抗なら変らないが(参考資料②)、モータだと大幅に変わる。
1 KHz より早くすると回転が落ちてくる。
上の TEST で異常なしだった周期 250 Hz で固定し、DUTY を 10 %z → 100 % とし、モータ両端電圧を測定
| DUTY(%) | モータ電圧(V)) | 挙動 |
| 10 | 0.058 | 起動できず |
| 20 | 0.150 | 起動できず |
| 30 | 0.470 | 異常なし |
| 40 | 0.685 | 異常なし |
| 50 | 0.855 | 異常なし |
| 60 | 0.992 | 異常なし |
| 70 | 1.102 | 異常なし |
| 80 | 1.193 | 異常なし |
| 90 | 1.270 | 異常なし |
| 100 | 1.380 | 異常なし |
DUTY 30 % ~100 % まで運転でき、周期の候補が 1 つ見つかった。
③ 疑問点 ① - 1 入力電圧は高いほど良いかの確認
Vm = 3.0 V、周期 250 Hz 固定で 起動できる DUTY ~ モータ両端電圧が 1.5 V を超える DUTY を探す。
| DUTY(%) | モータ電圧(V) | 挙動 |
| 10 | 0.313 | 起動できず |
| 15 | 0.431 | 起動 |
| 40 | 1.589 | 適正電圧オーバー |
Vm = 4.5 V、周期 250 Hz 固定で 起動できる DUTY ~ モータ両端電圧が 1.5 V を超える DUTY を探す。
| DUTY(%) | モータ電圧(V) | 挙動 |
| 8 | 0.210 | 起動できず |
| 9 | 0.308 | 起動 |
| 25 | 1.634 | 適正電圧オーバー |
Vm を高くすると小さい DUTY で起動できるようになるが、速度比が取れなくなるし、敏感になるので出力調整が難しくなる。
また過電圧保護も考えねばならなくなる。
周期 250 Hz 固定で Vm と起動できる DUTY を見る。
起動 〇、起動不可 ×
| DUTY(%) | Vm 1.5 V |
Vm 3.0 V |
Vm 4.5 V |
| 8 | × | × | × |
| 9 | × | × | 〇 |
| 14 | × | 〇 | 〇 |
| 30 | 〇 | 〇 | 〇 |
ある低速で起動する仕事量は決まっているので、1.5 V で 30 % 起動のとき、4.5 V なら 9 % 起動にしなければならない。
Vm を上げるとトルクは上がるが、回転数も上がるので、回転数を下げるために DUTY を下げねばならず、結局なにも得がない。
アクセル踏みながらブレーキ踏んでるようなもの。
起動時のブースターのイメージならそれはフィードバック制御をしなければできない。
④ 周期下限の確認
周期の下の限界を見るため、Vm = 1.5 V 、DUTY を 30 % とし、周波数を 1 Hz から 256 Hz まで上げ、挙動を見てみる。
脈動の可視化?のためモータ両端電圧をデジタルテスターとアナログテスター モノタロウ MR-3B の DC 2.5 V レンジで見た。
| 周期(Hz) | モータ電圧(V) | 挙動 |
| 1 | 振れて読めず | 脈動顕著× |
| 2 | 振れて読めず | 脈動顕著× |
| 4 | 振れて読めず | 脈動× |
| 8 | 0.6XX | 脈動△ |
| 16 | 0.620 | 脈動〇 |
| 32 | 0.613 | 電圧低下 |
| 64 | 0.594 | 電圧低下 |
| 128 | 0.550 | 電圧低下 |
| 256 | 0.464 | 電圧低下 |
周期を 20 Hz 以上にすれば脈動が気にならないようだ。
20 Hz 以上の回転音が OK かどうかの判定は正直なところできませんわ。
1 ~ 8 Hz ではゴオーッゴオーッ → ゴッゴッの脈動で両テスターとも大振れ。
8 Hz 以上のアナログテスターの振れは小刻みブルブルであるが、そう気にはならない。
10 Hz 以上ではブルブルがさらに少なくなり、20 Hz では指針がほぼ静止した。
このアナログテスターの指針ブーラブーラ → ブルブル → 静止は見ていて面白かった。
周期 1 Hz など論外と言われるが、1 Hz で動くおもちゃには使えるので、無意味ではない。
周期 1 Hz では 2 % ( 20 ms ON ) で起動した。
⑤ 起動可の周期と DUTY の確認
TEST②の 250 Hz 以下で起動可となる DUTY を見る。
| 周期(Hz) | 起動可 DUTY(%) | 挙動 |
| 250 | 36 | --- |
| 230 | 36 | --- |
| 210 | 36 | --- |
| 190 | 36 | --- |
| 170 | 31 | --- |
| 150 | 27 | --- |
| 130 | 27 | --- |
| 110 | 26 | --- |
| 90 | 26 | --- |
| 70 | 25 | --- |
| 50 | 24 | --- |
| 30 | 23 | --- |
| 10 | 19 | 脈動 |
起動するかしないかの分かれ目は数 % の誤差があり、傾向をみる程度のものと考えておく。
しかし 30 Hz の 23 % では起動するが 250 Hz の 23 % ではびくともしない。
Vm = 1.5 V で 周期を 1 Hz → 150 KHz にした時、起動できた DUTY を示す。
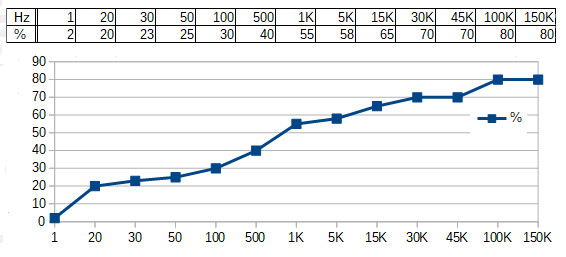
1 Hz では 2 % で起動、150 KHz では 80 % で起動した。
100 Hz では 30 % から 100 % が可変幅になる。
周期を早くすると可変幅が狭くなる。
DUTY 20 % 台を出した 20 Hz ~ 150 Hz がよさそうである。
(8)結論
疑問点は、大体わかったが、パラメータが互いに関連しているので最適の周期を見つけるのは容易でない。
モータは抵抗負荷のような計算通リの挙動とならない。
最大のポイントは負荷時の低速起動ができるかである。
FA-130RA-2270 で、(適正)負荷で、変速幅が大きく、騒音と加減速性は未評価 という限定条件での PWM パラメータは下記
①Vm は 1.5 V でよい。
3 V、4.5 V にすると変速幅減少、調整過敏、過電圧保護が必要などの弊害がある。
②周期は 20 ~ 100 Hz ぐらいが適当 ・・・ 意外に低い。
脈動限界 20 Hz で 22 % 760 rpm が最低速だった。
WEB 記事で散見する 1 KHz とか 10 KHz などでやってみたが、わざわざ可聴域でやる利点は見つからなかった。
やるなら聞こえない 25 KHz 以上だろう。
実際、DUTY が低く回転していない時、周期を上げていくとモータが鳴り出す。1 KHz だとキーンという音で回転していたらわからない音だ。小生では 9 KHz 以上で聞こえなくなった。
③DUTY は 22 ~ 100 %
④平滑コンデンサはつけない。
つけると③の DUTY を数 % 絞れるが必要というものではない。
コンデンサやコイルをつけだすと DC/DC コンバータになってしまい、荒っぽいが簡単な PWM 駆動ではなくなってしまうのでつけない。
実験結果パラメータでの運転データ
①FA-130、Vm = 1.5 V、周期 100 Hz、(適正)負荷で速比 1:3、63 rpm / 1 %
DUTY 30 % 未満は起動不安定
| DUTY(%) | モータ電圧(V) | 電流 (A) |
回転数 (rpm) |
| 30 | 0.550 | 0.31 | 2200 |
| 50 | 0.907 | 0.42 | 4356 |
| 70 | 1.133 | 0.45 | 5526 |
| 90 | 1.287 | 0.46 | 6258 |
| 100 | 1.368 | 0.51 | 6631 |
②FA-130、Vm = 1.5 V、周期 20 Hz、(適正)負荷で速比 1:8、71 rpm / 1 %
| DUTY(%) | モータ電圧(V) | 電流 (A) |
回転数 (rpm) |
| 22 | 0.320 | 0.35 | 780 |
| 30 | 0.576 | 0.40 | 2350 |
| 50 | 0.918 | 0.45 | 4128 |
| 70 | 1.130 | 0.50 | 5195 |
| 90 | 1.284 | 0.51 | 6124 |
| 100 | 1.351 | 0.52 | 6326 |
20 Hz 22 % 時の波形
DIV 1V 10 ms
周期 20 Hz から始め、脈動、騒音などの様子をみながら周期や DUTY を調整していくのがいいと思う。
おもちゃの種類によっても変わってくるだろうから個々の仕様に合わせて調整が必要となる。
騒音(雑音)は、プラレールでは問題ないだろうが、おやすみメリーでは NG かも。
(9)参考資料
①Vm 1.5 V のときの DUTY % と理論実効値 Vrms と理論平均値 Vave
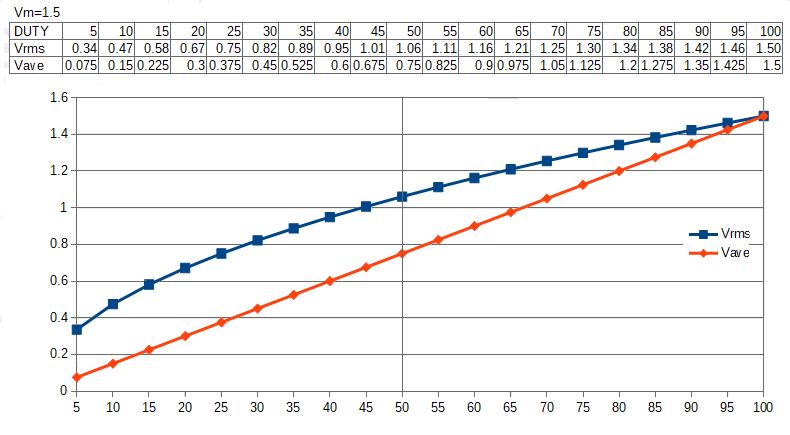
Vrms = 1.5 √D
Vave = 1.5 D / 100
Vave はリニア
②抵抗負荷の時、周期変化で変換値が変わらないの実験
Vm 1.49 V DUTY 10 % 負荷 10 Ω で 1 Hz → 150 KHz
| 周期(Hz) | 抵抗端子電圧(V) |
| 9 | 表示不安定 |
| 10 | 0.1457 |
| 20 | 0.1458 |
| ~ | 0.14XY |
| 20 K | 0.1434 |
| 50 K | 0.1294 |
| 100 K | 表示不安定 |
10 Hz まではテスター表示不安定、10 Hz ~ 50 KHz までは 0.14XY (V) で変わらず、50 KHz 以上で低下が始まり、100 KHz 以上で表示不安定となる。
表示不安定域はテスターが追従していないようだ。
抵抗負荷では V と I が同相で外乱も少ないので、周期変化しても変換値は変わらず一定と言っていい。
Vm 1.49 V DUTY 10 % の理論平均値は 0.149 V であり、テスター表示と合っていたので、変換値 = 理論平均値 = テスター値と言える。
抵抗両端にかかる波形は DUTY 10 % のパルス波であり、平均化などされていない。テスターが内部で積算し、平均して 0.149 V と表示しているだけである。
(10)その他
①経験や WEB 知識からの最適周期の予想では、30 KHz ぐらいと思っていたが無茶苦茶に外れてビックリ。
20 Hz なんてバカにされそうだが、適正負荷でちゃんと動いてるからやってみて!
☆昔、三相誘導電動機を変速するのにインバータを使ったが、低速にするとキュルキュルと耳障りな音がした。
10 KHz ぐらいで直流から交流を作っていたようで、モータがその周波数で振動していたらしい。
人間の可聴域は、20 Hz ~ 20 KHz なので、この範囲外でスイッチングすれば音は出ないはず。
音が出るのがわかっていながら 10 KHz にしたのは当時のスイッチング素子の速度などに問題があって難しかったのだろう。
88 鍵 ピアノの低い音は 27 Hz、高い音で 4 KHz ぐらいなので、この範囲も避けるのがいいだろう。
☆同上のインバータで、ある特定の周波数を出さないようにする設定があった。
機械には共振周波数があり、この周波数で振動すると機械が大ブレを起こして破壊してしまう。
FA - 130 モータのブラシ板に共振周波数があるかもしれない。
☆モータの周波数?
FA 130 は 1.5 V で無負荷では 9100 rpm(≒152 rps)である。整流子は 3 極なので 1 回転で 3 回断続するから 152 rps × 3 = 456 Hz で動いていると言えるのでないか?
3 V まで許容されており、無負荷では 16000 rpm(≒267 rps)(≒800 Hz)である。
音楽 CD が音域の倍の 44.1 KHz で制御されていることからすると、倍の 1.6 KHz であればよいのではないか?
②WEB の PWM 記事は、原理を確認する実験レベルでしかも無負荷運転がほとんどである。
無負荷とか LED ならたいていの設定で実験成功だが、モータで実負荷をかけたら動作しないほうが多いだろう。
変速幅も大きく取れるようにしたいが、負荷をかけないと周期を示すことができない。
また適当な負荷を用意するのも難しいので周期についてはとりあえず 1 KHz などとなってしまう。
これから PWM 記事を UP する人は具体的な負荷、例えばプラレールの『かがやき』タイプを 8 字走行させた時の周期と DUTY は ・・・ としてくれれば参考になる。
なんで『トーマス』でなく『かがやき』かというとモータ交換が楽だから、8 字は吊り下げ供給電線のねじれがないので連続運転できるから。
トラ貨車を牽引すれば荷重追加も自由自在だ。
市販 PWM ドライブキットの周期が 45 Hz から 100 KHz などと広いのは用途別のようであり、どれでも使えると思って買うと使い物にならないかも。
③回路図のモジュールの写真は、小生が写したものでなく、Amazon の商品写真を使った。
商品写真の設定値が FA-130 に適当な値であったのは偶然か?
このモジュールのおかげで各種テストが素早くできて重宝した。
シリアル通信を使えば周期と DUTY が設定できるので加減速性能が確認できる。PWM に興味のある方にはお勧め。
おもちゃ実機をマイコンで PWM する場合、これで周期、可変幅を確認してからソフトを作れば一発で OK である。
実験用としては、DUTY がパーミル 1 ‰ ~ 1000 ‰ にできるとサーボの TEST もしやすい。
④テスト中、ときたまブラシか整流子のリン青銅が焦げるような?ニオイがした。オゾン臭かも知れない。
適正以上の高電圧で高速回転したときに出るあのニオイであるが、新品(のはず)のモータで、延べ数時間の TEST で出るとは意外である。
オシロ波形でわかるような、PWM による激しい断続がニオイ( 劣化 )の元かもで、モータ寿命が極端に落ちるかも知れない。
省エネ、安価のため PWM にして騒音が出るわ寿命が下がるわというのなら、出力可変の DC/DC コンバータによる電圧制御のほうがいいのでは?
PWM 出力にインダクタとコンデンサをつければ DC/DC コンバータになるそうなので調べておこう。
⑤タミヤに低回転型 130 モータ ITEM 75028 があったので TEST した。
仕様は適正電圧 3 V、適正負荷 7gf-cm、7.100 rpm、0.45 A とある。
タミヤのミニ四駆用 FA-130 タイプノーマルモータ ITEM 94380 にくらべて低回転型というもので、マブチとは関係がない。
これを 1.5 V 直で、マブチの適正負荷を回してみたら、3200 rpm、0.27 A となり、マブチの約半分の回転数で回った。
この速度でよければ、PWM はいらない。
PWM の TEST では Vm = 1.5 V、周期 20 Hz、DUTY 45 % で 906 rpm で起動した。
カ-ボンブラシはニオイがしない?
⑥以前共立エレショップで買った DCC-06K を TEST してみた。

電源は 2 ~ 3 V なので 3 V でマブチ FA-130 で適正負荷をまわすと、低速は 350 rpm まで絞れ、低速での再起動も問題なしだった。
簡易フィードバック PWM ということで基本周期は 330 Hz ぐらいだが DUTY も周期も変わる。
周期が変わるので、フィードバックで DUTY を変える正統派 PWM?の研究には向かないが、シンプルで実戦用である。
アナログ回路を解読できないので調整ができないが、速比が 1:17 ぐらい取れているのでこのまま使えばいい。
現在は DCC-06SP で販売されており、回路入り説明書も公開されている。
⑦以前 Amazon で買った Rasbee 5A ミニ DCモータ PWM 速度コントローラーを TEST してみた。

基板刻印は、ZS-X4B、現在では同様らしいものが Hiletgo より販売されている。
入力は 3 - 15 V であるが、3 V 用のショートをしても不動だった。入力 4.7 V で動作開始した。
モータ電源が別にできるので、モータ電圧を 1.5 V にした。
1.5 V では FET(D60NF04LT)のドライブがしんどいようなので入力を 6 V にした。

DUTY 設定がボリウムなので 0-100 の目盛板をつけた。
ボリウムは SW 付きなので抵抗 0 は目盛 10 からになる。
周期の仕様は 10 KHz だが 実測は 13 KHz
マブチ FA-130 で適正負荷をまわすと、目盛 65(56%)1400 rpm で始動した。目盛 100 で 6200 rpm
モータ別電源の時の配線
⑧以前買った秋月 PWM DC モータ速度可変キット AE-555 PWM を TEST してみた。

基板電源 6 V、モータ電圧 1.5 V
周期の仕様は 10 KHz だが 実測は 4.8 KHz
マブチ FA-130 で適正負荷をまわすと、目盛 60(58%)1400 rpm で始動した。目盛 100 で 6750 rpm
555 タイマ使用で⑦と同じ結果であった。
---- 2020.11.13 ----