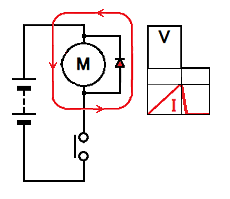
852 の正転のみの運転では、停止時の FET 破損防止としてモータに並列にフライホイルダイオードをつけた。
正転 OFF 時、電流はフライホイルダイオードを還流してゆっくり減衰した。
PWM で駆動したときの起動最低速は 周期 20 Hz DUTY 25 % であった。
正逆運転をする場合は、Hブリッジ回路を使用するが、ブレーキにショ-トブレーキという方法があり、PWM の場合、起動最低速の DUTY が低くできるという記事があったのでそれを確認してみる。
(2)Hブリッジのブレーキ方法
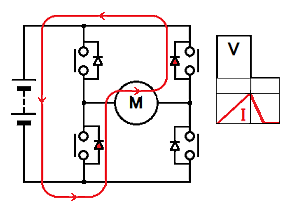
① Fast decay (減衰) モード(フリーモードまたはオープンモード)
SW を全て OFF にするモードで、モータ電流はフライホイルダイオードを経由して電源へ回生される。
回生なので電源とケンカするため次項の Slow decay モードより減衰が早いと思われる。
SW でなく FET の場合は寄生ダイオード経由となる。
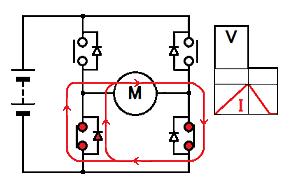
② Slow decay モード(ショートブレーキモード)
ハイサイドの SW を OFF、ローサイドの SW を ON にし、モータ電流をできるだけゆっくりと減衰させる。
モータの発電電流を長く流すことにより、モータトルクが長く継続するという。
(3)TEST機の構成
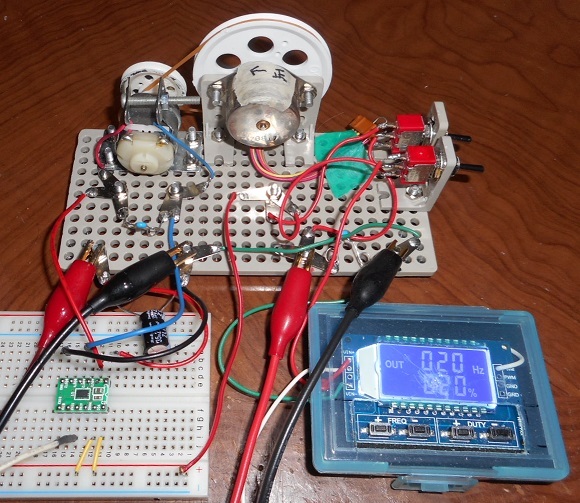
852 と同じ構成である。
① DC モータはマブチ FA-130RA-2270 とし、適正負荷 ( 1.5 V で 0.64 A、6623 rpm となる負荷 ) をまわす。
正逆はせず正方向運転のみとした。
モータにはノイズ除去用コンデンサとして 50 V 積層セラミック 0.1μF をつけた。
② モータドライバは、秋月の DRV8835 Board を使用し、ブレッドボード配線
H ブリッジが 2 回路あり並列運転ができるが 1 回路のみ使用
モータ電源 VM (0~11V)と制御電源 VCC(2~7V)が別にできる。
H ブリッジ ON 抵抗は 上下で 0.3 Ω
適正負荷時、0.64 A × 0.3 Ω = 0.192 V 降下するので VM は 1.5 + 0.192 = 1.692 V 以上となる。
PWM は 250 KHz まで対応とある。
③ PWM 信号は 852 と同じ GAOHOW モジュールを使用した。
(4)回路図
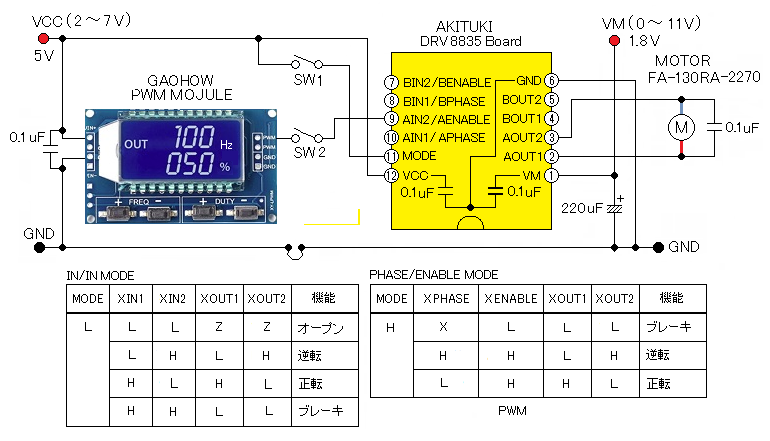
電源は PWM モジュールと DRV8835 Boared が DC 5 V、モータ用 VM は 1.8 V、GND は共通
VM には 発電吸収用に 220μF をつけた。
DRV8835の信号入力端子は、内部で 100 KΩプルダウンされているので、無接続だと L となる。
VCC 投入後 SW1 ON で MODE を H にすると、Phase/Enable モードとなり、 SW2 ON で ENABLE 端子に PWM 信号を入れると PWM ON 区間が正転、PWM OFF 区間はショートブレーキ運転となる。
(5)試運転
電圧は、Sanwa PM 3 デジタルテスターの DCV レンジで、電流は、定電圧電源付属の 3 桁デジタル電流計で、回転数は、デジタルタコメータ DT-2234C で測定
①モータドライバ単体 IN / IN モードの動作確認
VM = 2.2 V(モータ両端電圧が 1.5 V 近くになるようアジャスト)、負荷有り
IN1 → H で正転、モータ両端電圧 1.467 V、電流 0.51 A、7435 rpm
IN2 → H で逆転、モータ両端電圧 1.420 V、電流 0.51 A、6819 rpm
IN1、IN2 → L のオープンブレーキと IN1、IN2 → H のショートブレーキの停止状態に差は感じられない。
オシロ波形は
②モータドライバ IN / IN モード + PWM +オープンブレーキの動作確認
VM = 2.2 V、負荷有り
IN1 → PWM 20 Hz 50% で正転、モータ両端電圧 0.808 V、電流 0.45 A、3671 rpm
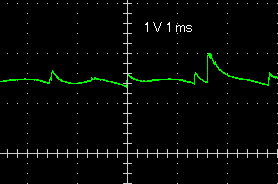
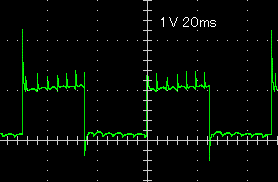
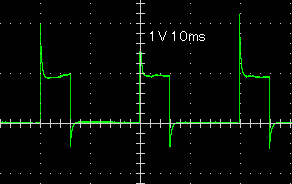
オシロ波形は
PWM OFF 時、- 4 V 近いヒゲがある。
③モータドライバ単体 Phase / Enable モード+ショートブレーキの動作確認
VM = 2.2 V、負荷有りで運転してみた。
MODE → H
ENABLE 1 → H で正転、モータ両端電圧 1.488 V、電流 0.52 A、6946 rpm
オシロ波形は①と変わらず。
④モータドライバ Phase / Enable モード+ PWM +ショートブレーキの動作確認
VM = 2.2 V、負荷有り
MODE → H
ENABLE 1 → PWM 20 Hz 50% で正転、モータ両端電圧 0.586 V、電流 0.52 A、2482 rpm
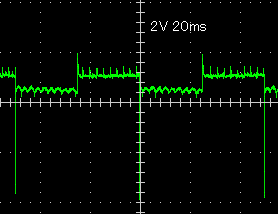
オシロ波形は
PWM OFF 時、- のヒゲが小さくなった。
(6)DUTYを下げられるかの確認
IN / IN のオープンブレーキと PHASE / ENABLE のショートブレーキを確認する。
① IN / IN モード
Vm = 2.0 V、20 Hz、DUTY 25 % → 減少
| DUTY(%) | モータ電圧(V) | モータ電流(A) | 回転数(RPM) | 挙動 |
| 25 | 0.35 | 0.33 | 943 | --- |
| 24 | 0.29 | 0.33 | 637 | --- |
| 23 | 0.26 | 0.25 | 430 | --- |
| 22 | 0.23 | 0.31 | 373 | --- |
| 21 | 0.22 | 0.34 | 302 | --- |
| 20 | 0.20 | 0.30 | 264 | --- |
| 19 | 0.17 | 0.26 | --- | 起動できず |
② PHASE / ENABLE モード
Vm = 2.0 V、20 Hz、DUTY 25 % → 減少
| DUTY(%) | モータ電圧(V) | モータ電流(A) | 回転数(RPM) | 挙動 |
| 25 | 0.25 | 0.26 | 434 | --- |
| 24 | 0.24 | 0.25 | 325 | --- |
| 23 | 0.23 | 0.26 | 351 | --- |
| 22 | 0.22 | 0.25 | 268 | --- |
| 21 | 0.21 | 0.24 | 252 | --- |
| 20 | 0.19 | 0.20 | --- | 起動できず |
①と大差がないようだが、②の回転には力強さが感じられた。カクカク感も増した。
(7)結論
852 で 20 Hz、DUTY 22 % 時のデータは、0.32 V、0.35 A、780 rpm であった。
IN / IN モードでは 264 rpm まで下げられたので、852 のモータ並列フライホイルダイオード減衰より長く電流が流れていると思われる。
PHASE / ENABLE ショートブレーキモードでは 252 rpm まで下げられたので、IN / IN モード オープンモードより長く電流が流れていると思われる。
オープンブレーキとショ-トブレーキの DUTY 差はあまりないが、トルクの差は歴然とあった。
ショ-トブレーキはトルクが強くなるので DUTY が下げられるという表現は半分正しいようである。
カクカク感が出るので、周期を上げねばならず、そのため 最低速の DUTY も上がってしまうのでオープンブレーキより低くできなくなる。
ショ-トブレーキは過酷な使用方法であり、その必要がなければ、オープンブレーキを使用したほうが寿命的に良いだろう。
H ブリッジ駆動で、PHASE / ENABLE ショートブレーキモードにする場合、カクカク感が増すので周期を 50 Hz にあげ、最低速は、DUTY 30 % とするのがいいだろう。
その時のモータ端子電圧は 0.32 V、電流は 0.31 A、回転数は 734 rpm であった。
(8)その他
①DRV8835 Board の PHASE/ENABLE Function 表の PHASE と ENABLE の位置が逆に書いてあったので、入力端子を当方が勝手に間違い、余計な時間がかかった。
秋月は Texas のデータシートをコピーしているので責任は Texas にあるが、試作 TEST 時にわかったはず。
②DRV8835 は VCC の OFF でスリープとなるが、VCC OFF 時、入力を OFF にしておくことが Texas のデータシートで推奨されている。
VCC OFF で MODE を ON にしておいたら、MODE 入力が壊れ、VCC と導通となり動作不能となった。
WEB で PHASE/ENABLE MODE を使った記事が少ないので、この注意喚起がない。
③この TEST でドライバ TC78H653FTG モジュール 2 個と DRV8835 Board を 3 個壊した。
貫通電流防止対応ありというのを信じ、マイコンなしでのブレッドボードに信号手差しが原因か?
負荷が重いのとショートブレーキで過酷だとは思うが、耐力不足で少々無理のような気がする。
---- 2020.12.13 ----